zOS (Z-Operating System)
zOS
Originally the ZPUTA/zOS developments only targetted the ZPU architecture and they had two primary methods of execution:
- as an application booted by IOCP,
- standalone booted as the ZPU Evo startup firmware.
More recently, zOS was ported to the ARM Cortex-M4 architecture for use with the Freescale K64F on the tranZPUterSW project. As the K64F is a fixed architecture CPU / SoC only one method of execution exists, 'standalone', it is stored in the onboard Flash and started when the CPU powers up.
In zOS, all non-OS functionality is stored as applications on an SD Card. If an SD Card isnt present then it is better to use ZPUTA as it has the ability to cater for limited FPGA BRAM resources as all functionality of ZPUTA can be enabled/disabled within the primary loaded image.
Originally zOS only operated with a Terminal Emulator via a serial line, but with the advent of the tranZPUter SW-700, zOS now To operate, zOS requires a serial connection (physical or usb-virtual) with preferably an ANSI/VT100 terminal emulator package connected to it. The requirement for an ANSI/VT100 terminal emulation package is to allow commands such as the editor or readline to function correctly. A dumb serial terminal will work fine but at reduced application functionality. If no serial connection is available or an interactive OS is not needed, just the ability to boot an application on power up, then the IOCP would be the better choice (albeit not yet ported to the K64F).
A recent hardware development, the tranZPUter SW-700 v1.3 sees zOS operating as a host OS where the keyboard and display are under its direct control. In order to maintain backward compatibility with the serial based applications, an ANSI terminal emulator has been developed and embedded.
Using the OS
When working on some of my projects in this repository it has always been at the forefront of my thoughts that I wanted a similar environment, even on an embedded system with limited resources, where I could monitor, change or fix on the fly. This requirement started off with the IOCP which has basic monitoring, uploading and execution functionality and was further enhanced when I started writing ZPUTA with its enhanced functionality and external applications.
Time scheduling, at least a basic level will soon be implemented which will allow an embedded application driving the hardware to run as required yet still leave processing resource to run the OS and provide services to a connected user/developer. The K64F version of zOS uses threads for tranZPUter board control but this needs to be encapsulated in defined API's and made available on the ZPU and NIOS II architectures.
The projects dont have a network stack as most dev boards I've used dont have ethernet which limits connectivity to the serial line. I'm considering adding an ESP32 module onto future tranZPUter cards and so networking will remain under consideration until this addition is realised.
The advantage of asynchronous serial communications is it is simple and can be connected to a terminal on nearly every PC, either direct via a USB adapter or via RS-232. I could implement SLIP but keeping it simple at this level is my preferred alternative. So long as you can connect a serial line between the dev board hosting zOS and a PC you can use it's functionality.
The OS interface has been written keeping in mind that only a serial text based terminal is available. Some components such as the Editor need more advanced capabilities and to this end the venerable VT100/ANSI emulation was chosen as a suitable candidate (which means you need a VT100/ANSI emulator sat in front of the serial line in order to use the Editor). Interaction is keyboard and text based, (no nice GUI interfaces!) with the sections below providing information needed to use the interface.
Command Line
The first introduction to the OS is a sign-on message which details the CPU, version etc and issues a prompt for command input, ie:
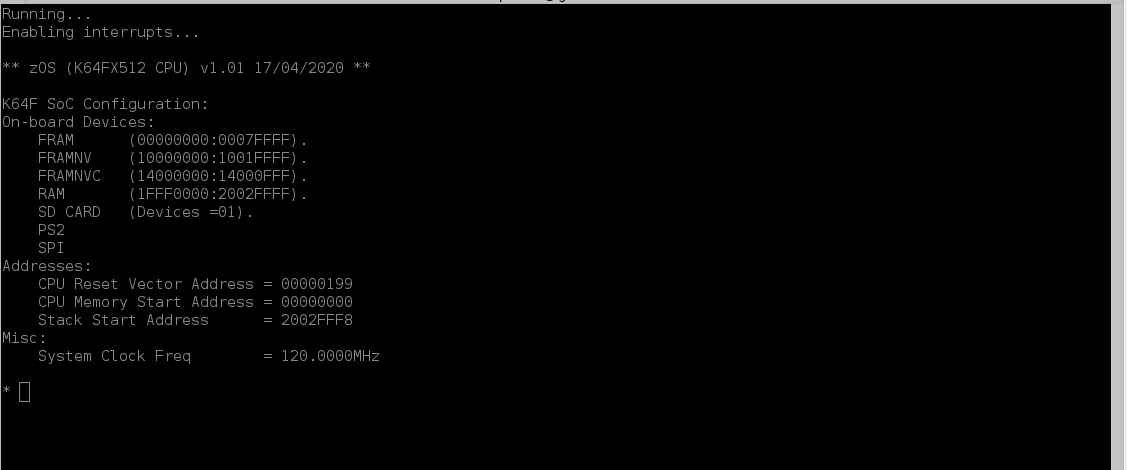
The zOS command line is not a shell interpreter just a basic text interface provided for the issuing of built-in commands or commands stored on the SD card. It does include a cutdown readline capability with history to aid in command entering and retrieval and generally follows the GNU readline functionality, the recognised keys at the command line are:
| Key | Action |
|---|---|
| CTRL-A | Go to start of line. |
| CTRL-B | Move cursor one position to the left. |
| CTRL-C | Abort current line and return CTRL-C to calling application. |
| CTRL-D | Not defined in shell, passed to running application. |
| CTRL-E | Go to end of line. |
| CTRL-F | Move cursor one position to the right. |
| CTRL-K | Clear the line. |
| CTRL-N | Recall next historized command. |
| CTRL-P | Recall previous historized command. |
| HOME | Go to start of line. |
| END | Go to end of line. |
| INSERT | Not yet defined. |
| DEL | Delete character under cursor. |
| BACKSPACE | Delete character to left of cursor. |
| PGUP | Not defined in shell, passed to running application. |
| PGDOWN | Not defined in shell, passed to running application. |
| ARROW UP | Recall previous historized command. |
| ARROW DOWN | Recall next historized command. |
| ARROW RIGHT | Move cursor one position to the right. |
| ARROW LEFT | Move cursor one position to the left. |
The readline mechanism also recognises a few internal commands, namely:
| Command | Action |
|---|---|
| !<number> | Recall and execute given historised command identified by <number>. |
| hist[ory] | List the history buffer. |
Applications
-
Disk IO Commands
Command Parameters Description ddump [<pd#> <sect>] Dump a sector dinit* <pd#> [<card type>] Initialize disk dstat* <pd#> Show disk status dioctl* <pd#> ioctl(CTRL_SYNC) -
Disk Buffer Commands
Command Parameters Description bdump <ofs> Dump buffer bedit <ofs> [<data>] … Edit buffer bfill <val> Fill buffer blen <len> Set read/write length for fread/fwrite command bread <pd#> <sect> [<num>] Read into buffer bwrite <pd#> <sect> [<num>] Write buffer to disk -
Filesystem Commands
Command Parameters Description falloc <fsz> <opt> Allocate ctg blks to file fattr <atrr> <mask> <name> Change object attribute fcat <name> Output file contents fcd <path> Change current directory fclose Close the open file fconcat <src fn1> <src fn2> <dst fn> Concatenate 2 files fcp <src file> <dst file> Copy a file fdel <obj name> Delete an object fdir [<path>] Show a directory fdrive <path> Change current drive fdump <name> [<width>] Dump a file contents as hex fexec* <name> <ldAddr> <xAddr> <mode> Load and execute file finit* <ld#> [<mount>] Force init the volume finspect <len> Read part of file and examine flabel <label> Set volume label fload* <name> [<addr>] Load a file into memory fmkdir <dir name> Create a directory fmkfs <ld#> <type> <au> Create FAT volume fopen <mode> <file> Open a file fread <len> Read part of file into buffer frename <org name> <new name> Rename an object fsave <name> <addr> <len> Save memory range to a file fseek <ofs> Move fp in normal seek fshowdir Show current directory fstat [<path>] Show volume status ftime Change object timestamp ftrunc Truncate the file at current fp fwrite <len> <val> Write part of buffer into file fxtract <src> <dst> <start pos> <len> Extract a portion of file -
Memory Commands
Command Parameters Description mclear <start> <end> [<word>] Clear memory mcopy <start> <end> <dst addr> Copy memory mdiff <start> <end> <cmp addr> Compare memory mdump [<start> [<end>] [<size>]] Dump memory mperf <start> <end> [<width>] [<size>] Test memory performance.
This gives a value for the CPU <-> Memory, not actual memory performance. As the ZPU is stack based, it uses memory to perform a memory action, so it will never realise full memory bandwidth, hence the need for extended instructions such as LDIR.msrch <start> <end> <value> Search memory. mtest [<start> [<end>] [iter] [test mask] Test memory meb <addr> <byte> […] Edit memory (Bytes) meh <addr> <h-word> […] Edit memory (H-Word) mew <addr> <word> […] Edit memory (Word) -
Hardware Commands
Command Parameters Description hr Display Register Information ht Test uS Timer -
Performance Testing Commands
Command Parameters Description dhry Dhrystone Test v2.1 coremark CoreMark Test v1.0 -
Program Execution Commands
Command Parameters Description call” <addr> Call function @ <addr> jmp” <addr> Execute code @ <addr> -
Miscellaneous Commands
Command Parameters Description restart Restart application reset Reset system help [<cmd %>|<group %>] Show this screen info Config info time [<y> <m> <d> <h> <M> <s>] Set/Show current time -
Applications
Command Parameters Description ed <file> Basic WYSIWYG VT100 File Editor kilo <file> WYSIWYG VT100 File Editor mbasic [<file>] Interactive Mini-Basic Interpreter. tbasic Interactive tiny Basic Interpreter. -
tranZPUter Commands
Command Parameters Description tzload See apps section for full list. Upload and Download files to the tranZPUter memory, grab a video frame or set a new frame. tzdump See apps section for full list. Dump tranZPUter memory to screen. tzclear See apps section for full list. Clear tranZPUter memory. tzclk See apps section for full list. Set the Z80 alternative CPU frequency. tzreset See apps section for full list. Reset the tranZPUter. tzio See apps section for full list. Z80 I/O Port read/write tool. tzflupd See apps section for full list. K64F FlashRAM update tool. Update the running zOS/ZPUTA kernel with a later version.
All commands with a (*) are built in to zOS.
autoexec.bat
Technical Detail
Memory Organisation
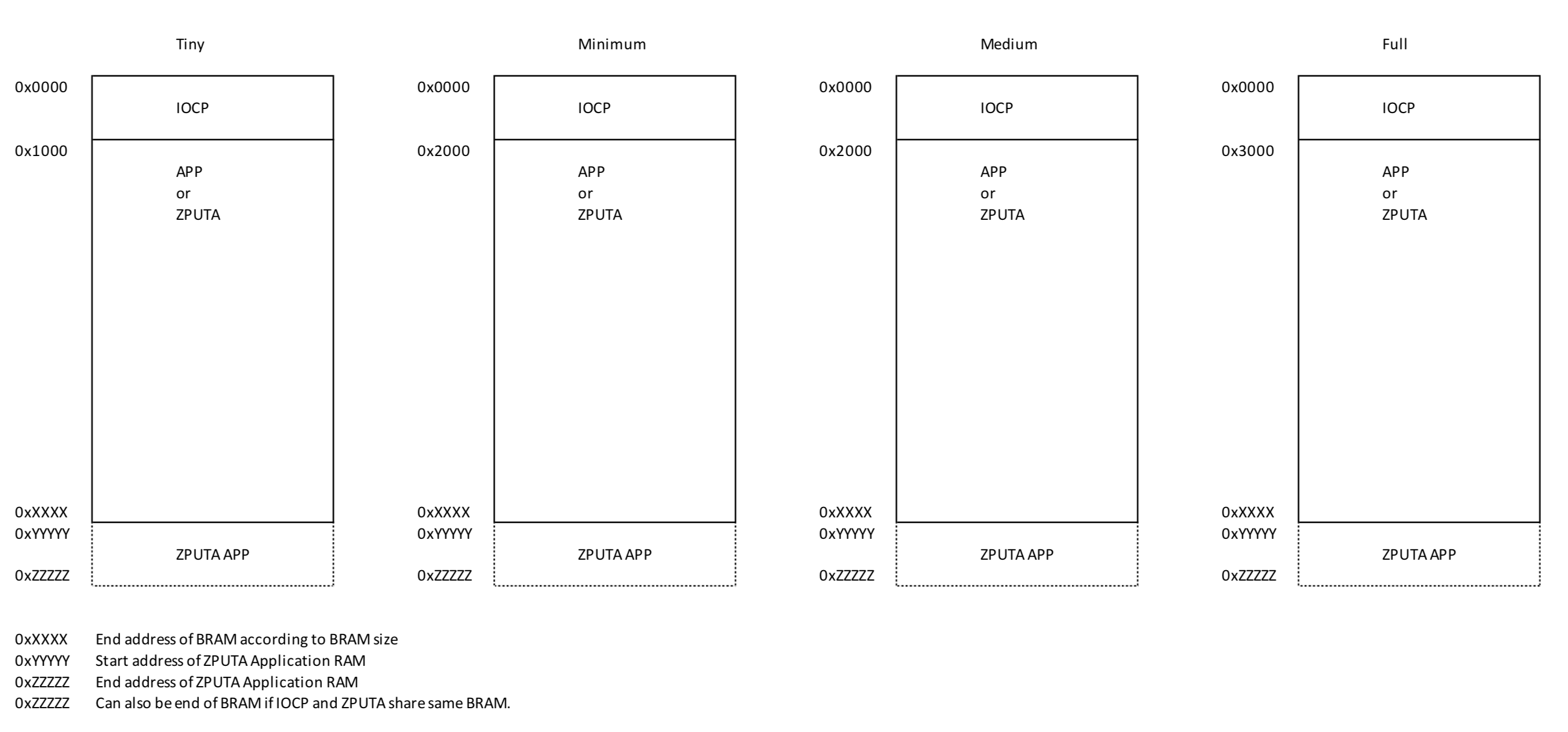
IOCP Memory Map
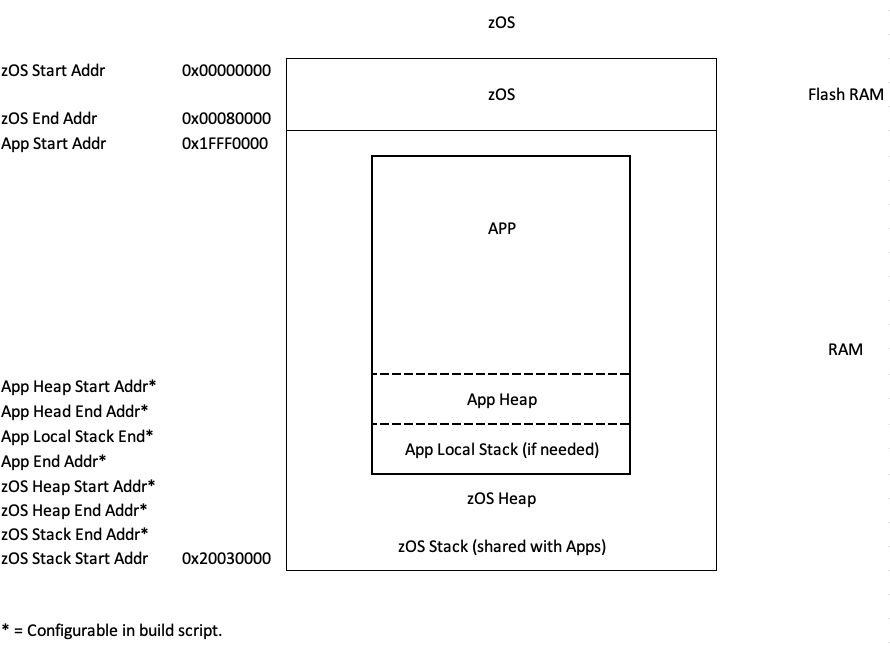
zOS Memory Map
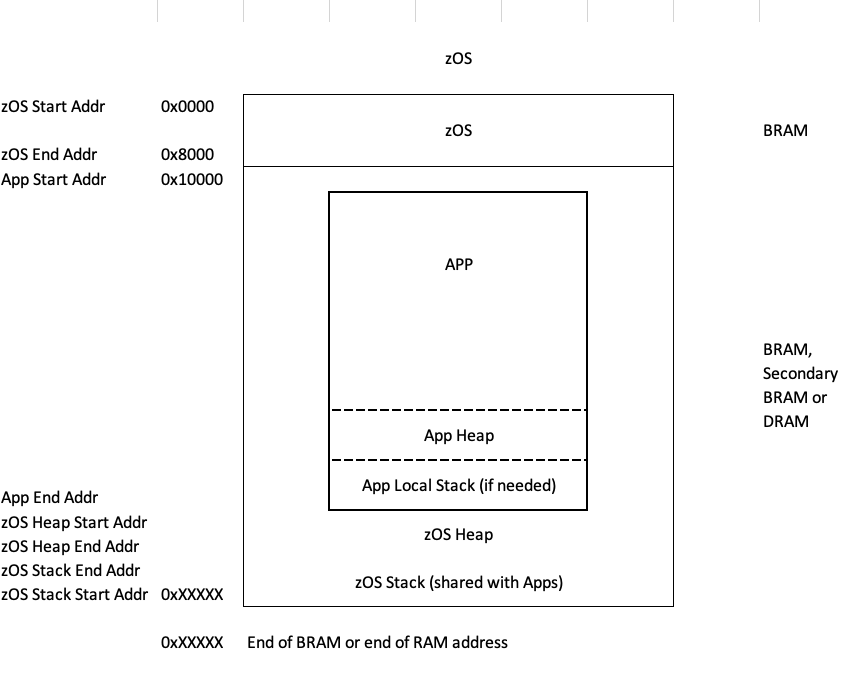
The memory usage map for the K64F processor is similar but Flash RAM and RAM are well defined not variable as per the ZPU.
Application Interface
As per most operating systems, zOS provides an API which a suitably compiled application can use to decrease it’s size and complexity and reuse features within the OS such as the serial line connectivity.
Rather than designing a custom API set of methods, it made more sense to expose methods within zOS to the application, ie. printf. An application calling printf to display output on the terminal will actually be calling printf within zOS. This is made possible by creating a jump table at a fixed vector within zOS. An application is then compiled with a set of macros to convert calls to printf to jumps into the zOS vector table.
At the moment, these API methods are exposed:
| Vector No | Method | Prototype | Description |
|---|---|---|---|
| 000 | _break | Break handler. | When a breakpoint instruction is encountered, method to handle it. |
| 001 | _putchar | void putchar(char c) | Send a single character at the lowest level to serial output device. |
| 002 | putc | void putc (char c) | Normal method to write a single character to the output stream. |
| 003 | fputc | void fputc (void (*func)(unsigned char), char c) | Write a character to the specified output device or stream. |
| 004 | puts | void puts (const char* str) | Put a string onto the output stream. |
| 005 | gets | int gets (char* buff, int len) | Get a string from the input stream. |
| 006 | fgets | int fgets (unsigned char (func)(void), char buff, int len) | Get a string from the specified input device or stream. |
| 007 | fputs | void fputs (void (func)(unsigned char), const char str) | Put a string onto the specified output device or stream. |
| 008 | xatoi | int xatoi (char** str, long* res) | Convert a string into a long. String can be any format or base. |
| 009 | uxatoi | int uxatoi(char **, uint32_t *) | Convert a string into an unsigned 32bit. String can be any format or base. |
| 010 | printf | void printf (const char* fmt, …) | Print a formatted string onto the output stream. Floating point is not supported. |
| 011 | vprintf | void vprintf (const char*, va_list ) | Print a varargs formatted string onto the output stream. Floating point is not supported. |
| 012 | sprintf | void sprintf (char* buff, const char* fmt, …) | Print a formatted string into a string. Floating point is not supported. |
| 013 | fprintf | void fprintf (void (func)(unsigned char), const char fmt, …) | Print a formatted string onto the specified output device or stream. |
| 014 | getScreenWidth | uint8_t getScreenWidth(void) | Return the current screen width. Primarily used when zOS acts as a User OS as the screen width is dynamic, for embedded use it returns a fixed constant. |
| 015 | getKey | int8_t getKey(uint8_t mode) | Get a single character at the lowest level from the keyboard, serial or physical. mode = 0 - host unmapped keyboard non-blocking, 1 - host unmapped keyboard blocking, 2 - ansi non-blocking, 3 - ansi blocking. Unmapped returns ANSI on a serial keyboard or the host hardware value, ie. Sharp MZ-700 keyscan code. |
| 016 | crc32_init | unsigned int crc32_init(void) | Initialise a CRC32 generator. |
| 017 | crc32_addword | unsigned int crc32_addword(unsigned int crc_in, unsigned int word) | Add a word into the generated CRC32, returns the current CRC32 value after adding the word. |
| 018 | get_dword | unsigned int get_dword(void) | Get an unsigned 32bit word (binary format, big endian) from the serial input device. |
| 019 | rtcSet | uint8_t rtcSet(RTC *time) | Set the onboard Real Time Clock to the given date and time. |
| 020 | rtcGet | void rtcGet(RTC *time) | Get the current date and time from the onboard Real Time Clock. |
| 021 | f_open | FRESULT f_open (FIL* fp, const TCHAR* path, BYTE mode) | Open or create a file |
| 022 | f_close | FRESULT f_close (FIL* fp) | Close an open file object |
| 023 | f_read | FRESULT f_read (FIL* fp, void* buff, UINT btr, UINT* br) | Read data from the file |
| 024 | f_write | FRESULT f_write (FIL* fp, const void* buff, UINT btw, UINT* bw) | Write data to the file |
| 025 | f_lseek | FRESULT f_lseek (FIL* fp, FSIZE_t ofs) | Move file pointer of the file object |
| 026 | f_truncate | FRESULT f_truncate (FIL* fp) | Truncate the file |
| 027 | f_sync | FRESULT f_sync (FIL* fp) | Flush cached data of the writing file |
| 028 | f_opendir | FRESULT f_opendir (DIR* dp, const TCHAR* path) | Open a directory |
| 029 | f_closedir | FRESULT f_closedir (DIR* dp) | Close an open directory |
| 030 | f_readdir | FRESULT f_readdir (DIR* dp, FILINFO* fno) | Read a directory item |
| 031 | f_mkdir | FRESULT f_mkdir (const TCHAR* path) | Create a sub directory |
| 032 | f_unlink | FRESULT f_unlink (const TCHAR* path) | Delete an existing file or directory |
| 033 | f_rename | FRESULT f_rename (const TCHAR* path_old, const TCHAR* path_new) | Rename/Move a file or directory |
| 034 | f_stat | FRESULT f_stat (const TCHAR* path, FILINFO* fno) | Get file status |
| 035 | f_chmod | FRESULT f_chmod (const TCHAR* path, BYTE attr, BYTE mask) | Change attribute of a file/dir |
| 036 | f_utime | FRESULT f_utime (const TCHAR* path, const FILINFO* fno) | Change timestamp of a file/dir |
| 037 | f_chdir | FRESULT f_chdir (const TCHAR* path) | Change current directory |
| 038 | f_chdrive | FRESULT f_chdrive (const TCHAR* path) | Change current drive |
| 039 | f_getcwd | FRESULT f_getcwd (TCHAR* buff, UINT len) | Get current directory |
| 040 | f_getfree | FRESULT f_getfree (const TCHAR* path, DWORD* nclst, FATFS** fatfs) | Get number of free clusters on the drive |
| 041 | f_getlabel | FRESULT f_getlabel (const TCHAR* path, TCHAR* label, DWORD* vsn) | Get volume label |
| 042 | f_setlabel | FRESULT f_setlabel (const TCHAR* label) | Set volume label |
| 043 | f_expand | FRESULT f_expand (FIL* fp, FSIZE_t szf, BYTE opt) | Allocate a contiguous block to the file |
| 044 | f_mount | FRESULT f_mount (FATFS* fs, const TCHAR* path, BYTE opt) | Mount/Unmount a logical drive |
| 045 | f_mkfs | FRESULT f_mkfs (const TCHAR* path, BYTE opt, DWORD au, void* work, UINT len) | Create a FAT volume |
| 046 | f_putc | FRESULT f_putc (TCHAR c, FIL* fp) | Put a character to the file |
| 047 | f_gets | FRESULT f_gets (TCHAR* buff, int len, FIL* fp) | Get a string from the file |
| 048 | disk_read | DRESULT disk_read ( BYTE drv, BYTE *buff, DWORD sector, UINT count ) | Read full or partial sectors directly from the SD card |
| 049 | disk_write | DRESULT disk_write ( BYTE drv, const BYTE *buff, DWORD sector, UINT count ) | Write full or partial sectors directly to the SD card |
| 050 | disk_ioctl | DRESULT disk_ioctl ( BYTE drv, BYTE ctrl, void *buff ) | Issue direct control commands to the SD card. |
| 051 | getStrParam | char *getStrParam(char **ptr) | Get a pointer within a string parameter list of the next string parameter. The pointer to the string parameter list is updated to point to the next+1 parameter. within a passed parameter string. |
| 052 | getUintParam | uint32_t getUintParam(char **ptr) | Get the next 32bit unsigned integer from a string parameter list. The pointer to the string parameter list is updated to point to the next+1 parameter. |
| 053 | set_serial_output | void set_serial_output(uint8_t c) | For boards with more than 1 serial port, assign the given device as the primary output stream device. |
| 054 | printFSCode | void printFSCode(FRESULT result) | Print as text the result code from the Fat FS calls. |
| 055 | malloc | void *malloc(size_t __size) | Allocate a block of memory on the heap. |
| 056 | realloc | void *realloc(void *__ptr, size_t __size) | Resize a block of memory, copying data if a new block is required. |
| 057 | calloc | void *calloc(size_t __size) | Allocate a zeroed block of memory on the heap. |
| 058 | free | void free(void *__ptr) | Release a block of memory back to the heap. |
| 059 | setupZ80Pins | void setupZ80Pins(uint8_t, volatile uint32_t *) | Initialise all pins according to their Z80 function. Setup hardware to logical mapping table. |
| 060 | resetZ80 | void resetZ80(uint8_t) | Perform a physical RESET of the Z80. |
| 061 | reqZ80Bus | uint8_t reqZ80Bus(uint32_t) | Request control of the Z80 Bus. |
| 062 | reqMainboardBus | uint8_t reqMainboardBus(uint32_t) | Request control of the Z80 Bus in order to access the host mainboard resources. |
| 063 | reqTranZPUterBus | uint8_t reqTranZPUterBus(uint32_t, enum TARGETS) | Request control of the Z80 Bus in order to access the tranZPUter resources. |
| 064 | setupSignalsForZ80Access | void setupSignalsForZ80Access(enum BUS_DIRECTION) | Setup direction of Z80 Access, Read or Write. |
| 065 | releaseZ80 | void releaseZ80(void) | Release previously granted Z80 Bus. |
| 066 | writeZ80Memory | uint8_t writeZ80Memory(uint32_t, uint8_t, enum TARGETS) | Write a byte to the Z80 host memory. |
| 067 | readZ80Memory | uint8_t readZ80Memory(uint32_t) | Read a byte from the Z80 host memory. |
| 068 | writeZ80IO | uint8_t writeZ80IO(uint32_t, uint8_t, enum TARGETS) | Write a byte to the Z80 I/O region. |
| 069 | readZ80IO | uint8_t readZ80IO(uint32_t, enum TARGETS) | Read a byte from the Z80 I/O region. |
| 070 | refreshZ80 | void refreshZ80(void) | Perform the next RAS refresh (for refreshing host DRAM). |
| 071 | refreshZ80AllRows | void refreshZ80AllRows(void) | Perform a full refresh (all rows) of the host DRAM. |
| 072 | setCtrlLatch | void setCtrlLatch(uint8_t) | Set the Memory Mode Latch to affect a different memory profile. |
| 073 | setZ80CPUFrequency | uint32_t setZ80CPUFrequency(float, uint8_t) | Set the frequency, 1Hz to 24MHz of the Z80 CPU. |
| 074 | copyFromZ80 | uint8_t copyFromZ80(uint8_t *, uint32_t, uint32_t, enum TARGETS) | Copy a block of memory from the Z80 host into the K64F RAM. |
| 075 | copyToZ80 | int8_t copyToZ80(uint32_t, uint8_t *, uint32_t, enum TARGETS) | Copy a block of memory from the K64F RAM/FlashRAM to the Z80 host memory. |
| 076 | fillZ80Memory | void fillZ80Memory(uint32_t, uint32_t, uint8_t, enum TARGETS) | Fill a block of memory hosted on the host to a set value. |
| 077 | captureVideoFrame | void captureVideoFrame(enum VIDEO_FRAMES, uint8_t) | Capture the contents of the screen video buffer and store in local RAM. |
| 078 | refreshVideoFrame | void refreshVideoFrame(enum VIDEO_FRAMES, uint8_t, uint8_t) | Refresh or write from the local RAM based video buffer to the host video buffer. |
| 079 | loadVideoFrameBuffer | FRESULT loadVideoFrameBuffer(char *, enum VIDEO_FRAMES) | Load the local RAM based video buffer with the contents of a file. |
| 080 | saveVideoFrameBuffer | FRESULT saveVideoFrameBuffer(char *, enum VIDEO_FRAMES) | Save the local RAM based video buffer to a file. |
| 081 | getVideoFrame | char *getVideoFrame(enum VIDEO_FRAMES) | Get the address of the local RAM based video frame. |
| 082 | getAttributeFrame | char *getAttributeFrame(enum VIDEO_FRAMES) | Get the address of the local RAM based video attribute frame. |
| 083 | loadZ80Memory | FRESULT loadZ80Memory(const char *, uint32_t, uint32_t, uint32_t, uint32_t *, enum TARGETS, uint8_t) | Load the Z80 host memory from the contents of a file. |
| 084 | loadMZFZ80Memory | FRESULT loadMZFZ80Memory(const char *, uint32_t, uint32_t *, enum TARGETS, uint8_t) | Load a Sharp MZF format file contents into Z80 memory. |
| 085 | saveZ80Memory | FRESULT saveZ80Memory(const char *, uint32_t, uint32_t, t_svcDirEnt *, enum TARGETS) | Save Z80 host memory contents to a file. |
| 086 | memoryDumpZ80 | int memoryDumpZ80(uint32_t, uint32_t, uint32_t, uint8_t, enum TARGETS) | Dump the contents of Z80 host memory to the current output device in a formatted hex format. |
| 087 | isZ80Reset | uint8_t isZ80Reset(void) | Test to see if an external Host RESET has occurred. |
| 088 | isZ80MemorySwapped | uint8_t isZ80MemorySwapped(void) | Sharp MZ-80A test to see if the memory from 0000 has been swapped to C000. |
| 089 | getZ80IO | uint8_t getZ80IO(uint8_t *) | Method to get a Z80 I/O event should one have occurred since the last poll. Later versions of the tranZPUter SW board v2.x no longer need to trap Z80 I/O events so this is deprecated. |
| 090 | clearZ80Reset | void clearZ80Reset(void) | Method to clear an external RESET event. |
| 091 | hardResetTranZPUter | void hardResetTranZPUter(void) | Method to force a hard reset of the tranZPUter board. |
| 092 | convertSharpFilenameToAscii | void convertSharpFilenameToAscii(char *, char *, uint8_t) | Method to convert a Sharp MZF filename into ASCII format. |
As well as the above methods, two global parameter blocks are exposed and passed to the application which it can freely use. These are:
The global parameter block, accessed by the variable G:
// Global parameters accessible in applications.
typedef struct {
uint8_t fileInUse; // Flag to indicate if file[0] is in use.
FIL File[MAX_FILE_HANDLE]; // Maximum open file objects
FATFS FatFs[FF_VOLUMES]; // Filesystem object for each logical drive
BYTE Buff[512]; // Working disk buffer
DWORD Sector; // Sector to read
#if defined __K64F__
uint32_t volatile *millis; // Pointer to the K64F millisecond tick
#endif
#if defined __TRANZPUTER__
int ctrlThreadId; // Id of tranZPUter control thread.
uint8_t ctrlThreadBusy; // Flag to indicate when the control thread cannot be disturbed.
#endif
} GLOBALS;
An example of use within a program would be:
printf("Sector:%d\n", G->Sector);
The configuration block, accessed by the variable cfgSoC:
// Configuration values.
typedef struct
{
uint32_t addrInsnBRAM;
uint32_t sizeInsnBRAM;
uint32_t addrBRAM;
uint32_t sizeBRAM;
uint32_t addrRAM;
uint32_t sizeRAM;
uint32_t addrSDRAM;
uint32_t sizeSDRAM;
uint32_t addrWBSDRAM;
uint32_t sizeWBSDRAM;
uint32_t resetVector;
uint32_t cpuMemBaseAddr;
uint32_t stackStartAddr;
uint16_t zpuId;
uint32_t sysFreq;
uint32_t memFreq;
uint32_t wbMemFreq;
uint8_t implSoCCFG;
uint8_t implWB;
uint8_t implWBSDRAM;
uint8_t implWBI2C;
uint8_t implInsnBRAM;
uint8_t implBRAM;
uint8_t implRAM;
uint8_t implSDRAM;
uint8_t implIOCTL;
uint8_t implPS2;
uint8_t implSPI;
uint8_t implSD;
uint8_t sdCardNo;
uint8_t implIntrCtl;
uint8_t intrChannels;
uint8_t implTimer1;
uint8_t timer1No;
} SOC_CONFIG;
An example of use in a program would be:
if(cfgSoC->implSDRAM) { ... }
This has the prototype:
uint32_t app(uint32_t param1, uint32_t param2)
The return code from the application to zOS is a 32bit unsigned integer. 0 means the application executed successfully, 0xFFFFFFFF indicates a failure and anything inbetween is for a more detailed failure, reference or to be used by future commands for conditional processing.
The standard template for an app() is as follows:
// Main entry and start point of a zOS/ZPUTA Application. Only 2 parameters are catered for and a 32bit return code, additional parameters can be added by changing the appcrt0.s
// startup code to add them to the stack prior to app() call.
//
// Return code for the ZPU is saved in _memreg by the C compiler, this is transferred to _memreg in zOS/ZPUTA in appcrt0.s prior to return.
// The K64F ARM processor uses the standard register passing conventions, return code is stored in R0.
//
uint32_t app(uint32_t param1, uint32_t param2)
{
// Initialisation.
//
char *ptr = (char *)param1;
long startAddr;
long endAddr;
long bitWidth;
long xferSize;
#if defined __K64F__
uint32_t perfTime;
#endif
uint32_t retCode = 0;
if (!xatoi(&ptr, &startAddr))
{
printf("Illegal <start addr> value.\n");
retCode = 0xFFFFFFFF;
} else if (!xatoi(&ptr, &endAddr))
{
printf("Illegal <end addr> value.\n");
retCode = 0xFFFFFFFF;
} else
{
xatoi(&ptr, &bitWidth);
if(bitWidth != 8 && bitWidth != 16 && bitWidth != 32)
{
bitWidth = 32;
}
if(!xatoi(&ptr, &xferSize))
{
xferSize = 10;
}
}
... application logic
return(retCode);
}
Software Build
This section shows how to make a basic zOS kernel. The start point for building zOS is the ‘build.sh’ script which contains all the logic required. This program started off as knowledge dumps and enhanced as the software progressed. It would be nice, eventually, to redesign this script as it is pushing into BASH shell language what really should be coded in Python or Java, but it works for now in building this software.
Paths
For ease of reading, the following shortnames refer to the corresponding path in this chapter.
| Short Name | Path | Description | |
|---|---|---|---|
| [<ABS PATH>] | The path where this repository was extracted on your system. | ||
| <apps> | [<ABS PATH>]/zsoft/apps | Application directory. All zOS/ZPUTA applications are located here along with their makefiles. | |
| <build> | [<ABS PATH>]/zsoft/build | A target output directory for the compiled software, ie. <z-build>/SD contains all files to be written to an SD card. | |
| <common> | [<ABS PATH>]/zsoft/common | Common C/C++ methods which are not assembled into a library. | |
| <libraries> | [<ABS PATH>]/zsoft/libraries | C/C++ libraries, usually part of a C/C++ installation but for embedded work, especially on the ZPU need to be created seperately. | |
| <teensy3> | [<ABS PATH>]/zsoft/teensy3 | The K64F based Teensy 3.5 software, some of which is used in the K64F version of zOS. Very rich libraries and can be easily added into a K64F programs. | |
| <include> | [<ABS PATH>]/zsoft/include | Common include header files. | |
| <startup> | [<ABS PATH>]/zsoft/startup | Embedded processor startup files, generally in Assembler. Templates and macros are used to create the correct targets memory model startup code. | |
| <iocp> | [<ABS PATH>]/zsoft/iocp | The IO Control Program, my initial bootloader for bootstrapping an application on the ZPU. | |
| <zOS> | [<ABS PATH>]/zsoft/zOS | The zOS source code, parameterised for the different target CPU’s. | |
| <zputa> | [<ABS PATH>]/zsoft/zputa | The ZPUTA source code, parameterised for the different target CPU’s. | |
| <rtl> | [<ABS PATH>]/zsoft/rtl | Register Transfer Level files. These are generated memory definition and initialisation files required when building for a ZPU target project. | |
| <docs> | [<ABS PATH>]/zsoft/docs | Any relevant documentation for the software. | |
| <tools> | [<ABS PATH>]/zsoft/tools | Tools to aid in the compilation and creation of target files. |
Tools
All development has been made under Linux, specifically Debian/Ubuntu. Besides the standard Linux buildchain, the following software is needed.
| ZPU GCC ToolChain | The GCC toolchain for ZPU development. Install into /opt or similar common area. |
| Arduino | The Arduino development environment, not really needed unless adding features to the K64F version of zOS from the extensive Arduino library. Not really needed, more for reference. |
| Teensyduino | The Teensy3 Arduino extensions to work with the Teensy3.5 board at the Arduino level. Not really needed, more for reference. |
For the Teensy3.5/K64F the ARM compatible toolchain is stored in the repo within the build tree.
Build Tree
The software is organised into the following tree/folders:
| Folder | Src File | Description |
|---|---|---|
| apps | The zOS/ZPUTA applications applets tree. These are separate standalone disk based applets which run under zOS/ZPUTA. All applets for zOS/ZPUTA are stored within this folder. |
|
| build | Build tree output suitable for direct copy to an SD card. The initial bootloader and/or application as selected are compiled directly into a VHDL file for preloading in BRAM in the devices/sysbus/BRAM folder. |
|
| common | Common C modules such as Elm Chan’s excellent Fat FileSystem. | |
| docs | All documents relevant to this project. | |
| libraries | Code libraries, soon to be populated with umlibc and FreeRTOS | |
| rtl | Register Transfer Level templates and generated files. These files contain the preloaded VHDL definition of a BRAM based RAM/ROM used with the ZPU. | |
| teensy3 | Teensy 3.5 files required for building a K64F processor target. | |
| include | C Include header files. | |
| iocp | A small bootloader/monitor application for initialization of the ZPU. Depending upon configuration this program can either boot an application from SD card or via the Serial Line and also provide basic tools such as memory examination. | |
| startup | Assembler and Linker files for generating ZPU applications. These files are critical for defining how GCC creates and links binary images as well as providing the micro-code for ZPU instructions not implemented in hardware. | |
| tools | Some small tools for converting binary images into VHDL initialization data. | |
| zputa | The ZPU Test Application. This is an application for testing the ZPU and the SoC components. It can either be built as a single image for pre-loading into a BRAM via VHDL or as a standalone application loaded by the IOCP bootloader from an SD card. The services it provides can either be embedded or available on the SD card as applets depending on memory restrictions. | |
| zOS | The z-Operating System. This is a light OS derived from ZPUTA with the aim of providing a framework, both for application building and runtime control, within a ZPU or K64F project. The OS provides disk based services, common hardware access API and additional features to run and service any application built for this enviroment. Applications can be started autonomously or interactively via the serial based VT100 console. | |
| build.sh | Unix shell script to build IOCP, zOS, ZPUTA and Apps for a given design.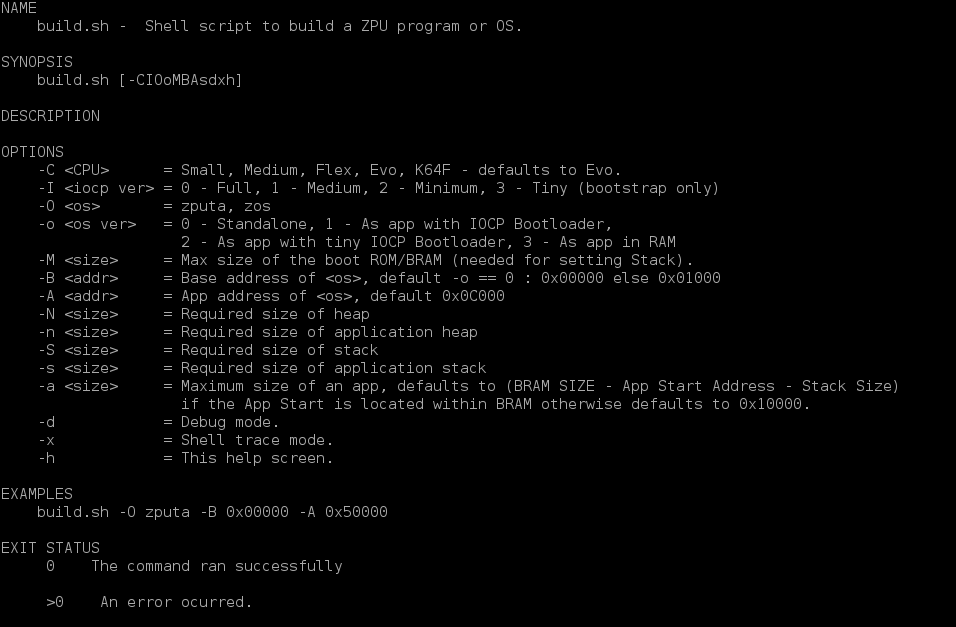 |
|
| buildall | Unix shell script to build all dependencies for a tranZPUter SW-700 v1.3 board including embedded zOS+applications for the K64F and host zOS+applications for the ZPU running as the host OS. |
Build.sh
zOS is built using the ‘build.sh’ script. This script encapsulates the Makefile system with it’s plethora of flags and options. The synopsis of the script is below:
NAME
build.sh - Shell script to build a ZPU/K64F program or OS.
SYNOPSIS
build.sh [-CIOoMBAsTZdxh]
DESCRIPTION
OPTIONS
-C <CPU> = Small, Medium, Flex, Evo, EvoMin, K64F - defaults to Evo.
-I <iocp ver> = 0 - Full, 1 - Medium, 2 - Minimum, 3 - Tiny (bootstrap only)
-O <os> = zputa, zos
-o <os ver> = 0 - Standalone, 1 - As app with IOCP Bootloader,
2 - As app with tiny IOCP Bootloader, 3 - As app in RAM
-M <size> = Max size of the boot ROM/BRAM (needed for setting Stack).
-B <addr> = Base address of <os>, default -o == 0 : 0x00000 else 0x01000
-A <addr> = App address of <os>, default 0x0C000
-N <size> = Required size of heap
-n <size> = Required size of application heap
-S <size> = Required size of stack
-s <size> = Required size of application stack
-a <size> = Maximum size of an app, defaults to (BRAM SIZE - App Start Address - Stack Size)
if the App Start is located within BRAM otherwise defaults to 0x10000.
-T = TranZPUter specific build, adds initialisation and setup code.
-Z = Sharp MZ series ZPU build, zOS runs as an OS host on Sharp MZ hardware.
-d = Debug mode.
-x = Shell trace mode.
-h = This help screen.
EXAMPLES
build.sh -O zputa -B 0x00000 -A 0x50000
EXIT STATUS
0 The command ran successfully
>0 An error ocurred.
Sensible defaults are configured into the script, the overriding flags are described below.
| Flag | Description |
|---|---|
| -C <CPU> | The target CPU of the finished image. This flag is necessary As each ZPU has a different configuration and therefore the underlying Make needs to be directed into its choice of startup code and configuration. With the inclusion of the ARM based K64F this flag makes further sense. The choices are: Small - An absolute minimum ZPU hardware design with most instructions implemented in microcode. Medium - An interim ZPU design using more hardware and better performance, majority of instructions are embedded in hardware. Flex - A ZPU small based design but with many enhanced features, including the majority of instructions being embedded in hardware. Evo - The latest evolution of the ZPU, all instructions are embedded in hardware, framework to add extended instructions and 2 stage cache to aid performance. K64F - An ARM Cortex-M4 based processor from Freescale. Evo is the detault. |
| -I <iocp ver> | Set the memory model for the build. The memory models are described above. The choices are: 0- Full 1 - Medium 2 - Minimum 3 - Tiny (bootstrap only). Default is set to 3. |
| -O <os> | Set the target operating system. The choices are: zputa - The ZPU Test Application which also runs on the K64F. zos - The zOS Operating System. There is no default, if an OS is being built then this flag must be given. |
| -o <os ver> | Set the operating system target model. The choices are: 0 - Standalone, the operating system is the startup firmware. 1 - As app with IOCP Bootloader, the operating system is booted by IOCP from an SD card, IOCP remains memory resident. 2 - As app with tiny IOCP Bootloader, the operating system is booted from SD card by the smallest IOCP possible, IOCP remains memory resident. 3 - As app in RAM, the operating system is targetted to be loaded in external (to the FPGA) RAM, either static or dynamic, IOCP remains memory resident in BRAM. The default is 2. This flag has no meaning for the K64F target. |
| -M <size> | Specify the maximum size of the boot ROM/BRAM (needed for setting Stack). This flag has no meaning on the K64F target. |
| -B <addr> | Base address of <os>. default: if -o == 0 : 0x00000 else 0x01000 This flag has no meaning on the K64F target. |
| -A <addr> | App starting/load address for the given <os>. default 0x0C000 for ZPU, 0x1FFF0000 for K64F |
| -N <size> | Required size of <os> heap. The OS and application heaps are currently distinct. Should RTOS be integrated into zOS then this will change. |
| -n <size> | Required size of application heap. The application has a seperate heap allocated and is managed by the application. |
| -S <size> | Required size of stack. Normally the <os> manages the stack which is also used by an application. If the application is considered dangerous then it should be allocated a local stack. |
| -s <size> | Required size of application stack. Normally this should not be required as the application shares the <os> stack. If the application is dangerous then set this value to allocate a local stack. |
| -a <size> | Maximum size of an application. defaults to (BRAM SIZE - App Start Address - Stack Size) for the ZPU if the App Start is located within BRAM otherwise defaults to 0x10000, or 0x20030000 - Stack Size - Heap Size - 0x4000 for the K64F. If the App Start is located within BRAM otherwise defaults to 0x10000. |
| -T | TranZPUter specific build, adds initialisation and setup code. Build as an embedded OS for the tranZPUter board. |
| -Z | Sharp MZ series ZPU build, zOS runs as an OS host on Sharp MZ hardware. Build as a host OS for the Sharp MZ series computer running a ZPU/NIOSII as the host processor. |
| -d | Debug mode. Enable more verbose output on state and decisions made by the script. |
| -x | Shell trace mode. A very low level, line by line trace of shell execution. Only used during debugging. |
| -h | This help screen. |
To build the standard zOS to be run on a Freescale K64F processor, you would issue the command:
<ABS PATH>/build.sh -C K64F -O zos -B 0x00000000 -N 0x00002000 -S 0x00001000 -A 0x1FFF0000 -n 0x00020000 -s 0x00000000
This specifies that the:
- target CPU is the K64F processor (-C K64F),
- target OS is zOS (-O zos),
- base or starting address of the generated firmware is 0x00000000 (-B 0x00000000),
- heap for zOS is 0x00002000 bytes in size (-N 0x00002000),
- the stack for zOS is 0x000010000 bytes in size (-S 0x000010000),
- starting address for applications is base of RAM at 0x1FFF0000 (-A 0x1FFF0000),
- application heap size is 0x00020000 (-n 0x00020000),
- application doesnt have a local stack (-s 0x00000000).
When complete, the output will be stored in two locations:
<zOS>/main.(hex | bin | srec) - The main zOS firmware in 3 standard formats which can be flashed directly into the K64F FlashRAM at 0x00000000.<br>
<build>/SD - Applications (and kernels if using the ZPU processor with IOCP) which can be copied directly to a FAT32 formatted SD card.<br>
Credits
Where I have used or based any component on a 3rd parties design I have included the original authors copyright notice within the headers or given due credit. All 3rd party software, to my knowledge and research, is open source and freely useable, if there is found to be any component with licensing restrictions, it will be removed from this repository and a suitable link/config provided.
Licenses
The original ZPU uses the Free BSD license and such the Evo is also released under FreeBSD. SoC components and other developments written by me are currently licensed using the GPL. 3rd party components maintain their original copyright notices.
The FreeBSD license
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
- Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
THIS SOFTWARE IS PROVIDED ``AS IS’’ AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE ZPU PROJECT OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
The views and conclusions contained in the software and documentation are those of the authors and should not be interpreted as representing official policies, either expressed or implied, of the this project.
The Gnu Public License v3
The source and binary files in this project marked as GPL v3 are free software: you can redistribute it and-or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
The source files are distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.